{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Planung von ABB und KUKA Roboteranlagen
Roboterzellen für „Standard Automatisierungen“ sind häufig ähnlich. Diese Roboterzellen müssen in der Regel nicht mehr geplant, sondern nur angepasst werden.
Der Grundaufbau dieser Roboterzellen, die eingesetzten Roboter, die Greifertechnik, und auch die Roboterprogramme sowie Schnittstellen sind in diesen „Standard-Roboterzellen“ einmal entwickelt worden, und im Aufbau häufig gleich. Dadurch können die Planungs- und Baukosten von „Standard-Roboterzellen“ erheblich gesenkt werden.
Beispiele für solche „Standard-Roboterzellen“ sind z.B. Roboterzellen zum
• Roboterschweißen,
• Lackierroboter, oder
• Roboter für die Bestückung bzw. Beschickung von Werkzeugmaschinen mit Werkzeugen oder Material.
Sonderroboteranlagen – individuelle Roboterzellen – kundenspezifische Fertigungsautomation
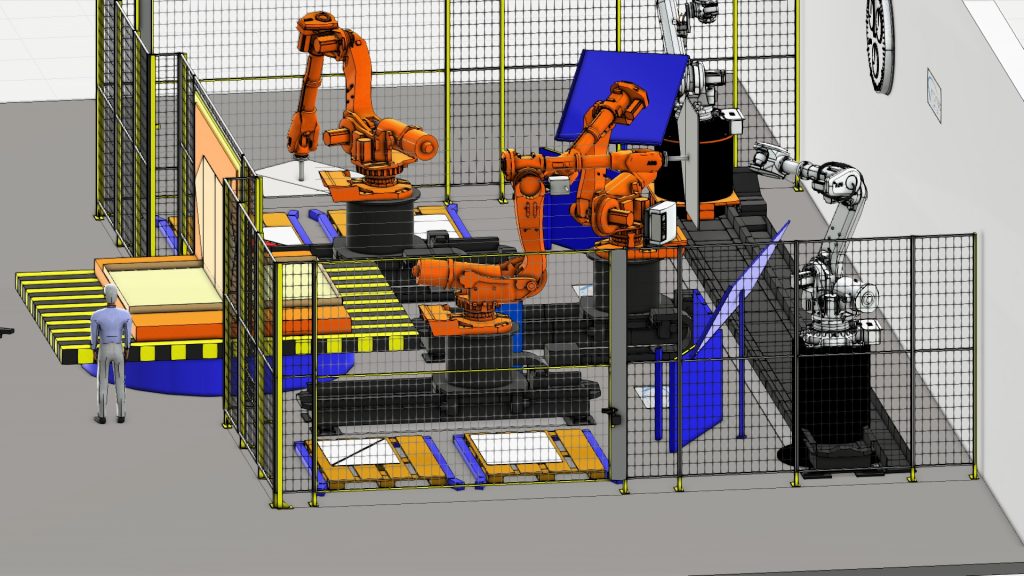
Die große Mehrheit der von uns gelieferten Roboteranlagen sind keine Standard-Roboterzellen, sondern werden entsprechend der Anforderungen unserer Kunden individuell geplant, gebaut, und dann häufig in bestehende Produktionen integriert, um bisher manuell durchgeführte Arbeiten mit Robotern zu automatisieren.
„Erfindungen“ zum Festpreis mit fixem Liefertermin
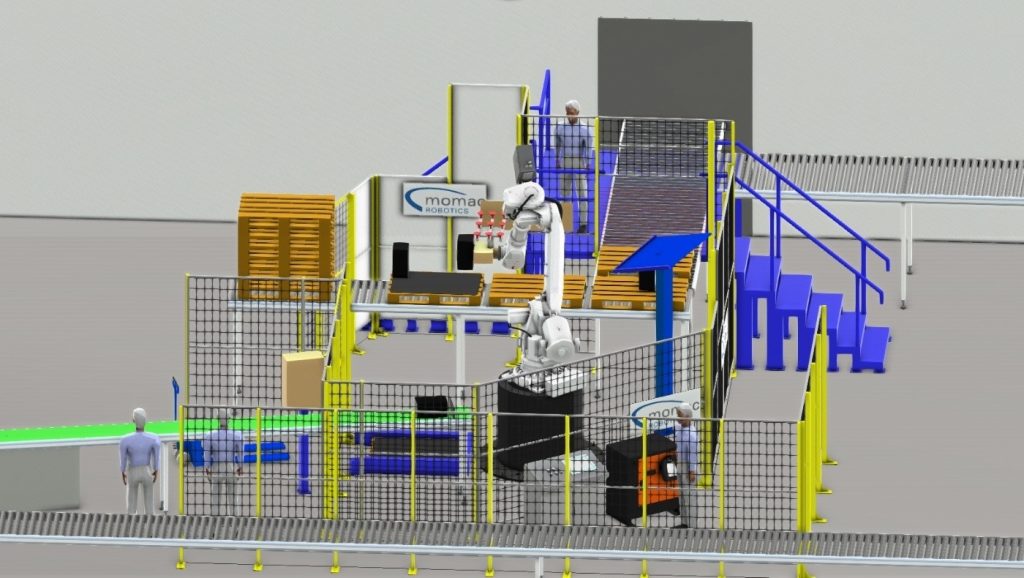
Viele der von uns gelieferten Automatisierungen sind so oder ähnlich noch nicht gebaut worden. Ein ergeblicher Anteil der von uns geplanten und gelieferten Sonder-Roboteranlagen wird ausserhalb der OEM Automobilindustrie eingesetzt. Für einige unserer Kunden ist es der erste Einsatz von Robotern in der eigenen Produktion.
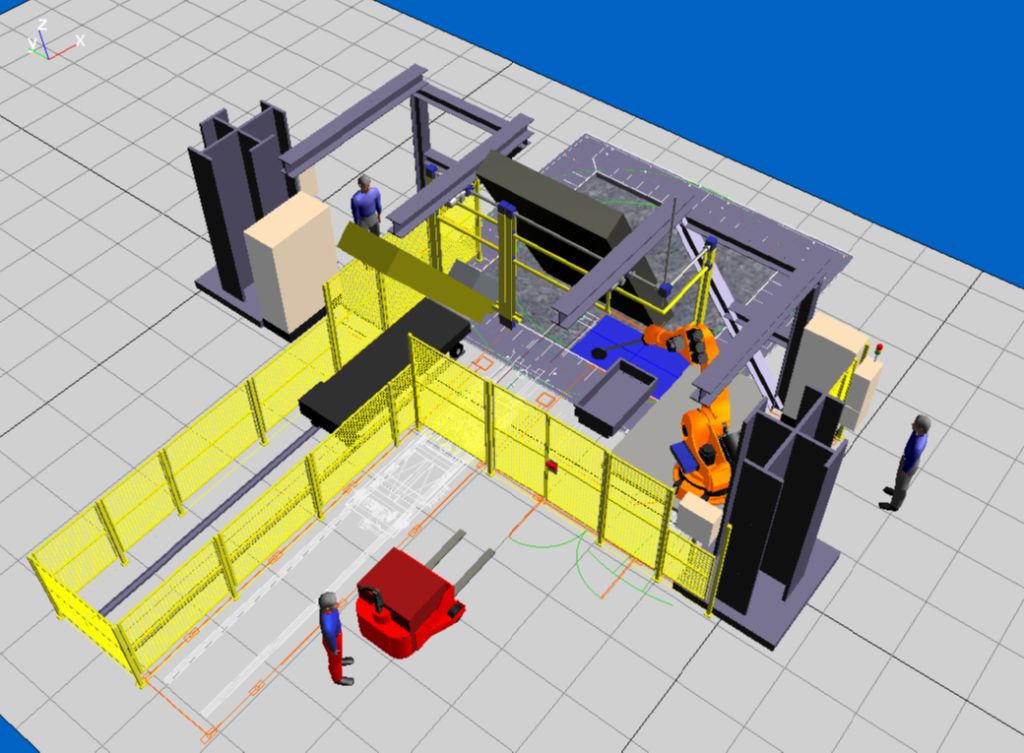
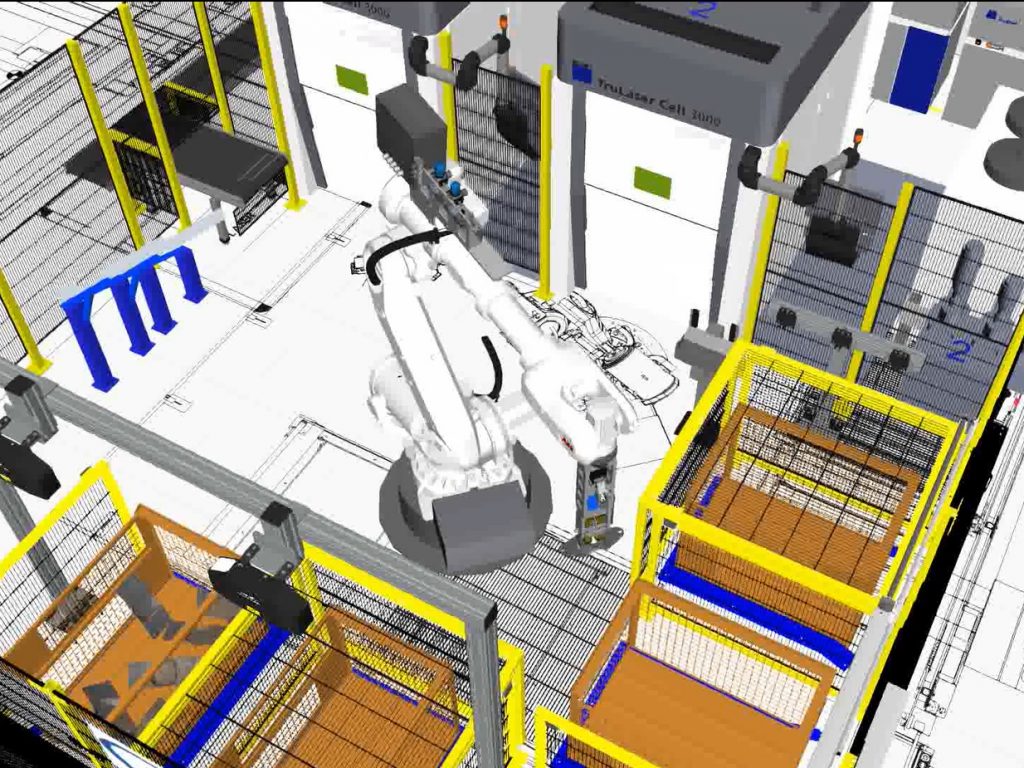
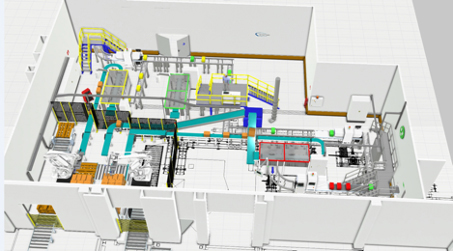
Diese hoch induviduellen Automatisierungsprojekte erfordern eine möglichst genaue und detaillierte Planung, um spätere Probleme, Verzögerungen oder Schlimmeres bei der Inbetrienahme zu vermeiden. Aus diesem Grund werden die von uns geplanten Roboteranlagen zunehmend bis hin zum Digitalen Zwilling detailliert.
Häufig an uns gestellte Fragen rund um die Planung von Roboteranlagen:
Worüber solle ich mir bereits Gedanken gemacht haben wenn ich eine individuelle Roboterzelle bei einem Robotersystemanbieter / Roboterintegrator planen lassen möchte?
Was muss ich für die Planung einer Roboteranlage beistellen oder selber machen?
Wie lange dauert die Planung einer Roboteranlage?
Was kostet die Planung einer Roboteranlage, was kostet eine Roboteranlage?
Brauche ich ein Pflichtenheft, und wenn ja wie umfangreich muss das von mir erstellte Pflichtenheft sein eine Roboteranlage planen zu können?
Was ist der Unterschied zwischen einer Machbarkeitsstudie und der Planung einer Roboteranlage?
Was bekomme ich genau wenn ich die Planung einer neuen Roboteranlage bei einen Systemintegrator / Roboteranbieter anfrage?
Wie belastbar ist die Planung einer Roboteranlage, Wie detailliert kann der spätere Durchsatz oder die Taktzeit einer Roboteranlage im geplant werden?
Wie und wo finde ich den passenden Partner / Anbieter für die Planung von Roboteranlagen?